摘要:
在工业人机协同装配场景中,遮挡因素显著影响人体姿态估计精度。浙江大学机械工程学院在中科院一区期刊发表研究,提出一种面向遮挡环境的视觉-惯性融合人体姿态估计方法。该方法结合 RGB 视觉与稀疏 IMU 数据,并通过光学动作捕捉系统获取高精度人体姿态真值进行实验验证,在多数据集和真实装配场景中表现出良好的鲁棒性与准确性。 阅读全文
posted @ 2026-01-12 18:32
您家豆子
阅读(64)
评论(0)
推荐(0)
摘要:
在双臂机器人抓取任务中,被抓物体的姿态不确定性是制约精确操作的重要因素。日本大阪大学万伟伟老师团队在 IEEE Robotics and Automation Letters 发表研究,提出一种双臂重复抓取规划与控制方法,通过连续三次正交抓取主动降低物体姿态不确定性。
在实验验证阶段,研究团队引入 NOKOV度量动作捕捉系统,获取被抓取物体的高精度位姿真值数据,用于验证该方法在物体姿态估计与收敛方面的有效性。 阅读全文
posted @ 2026-01-12 18:00
您家豆子
阅读(79)
评论(0)
推荐(0)
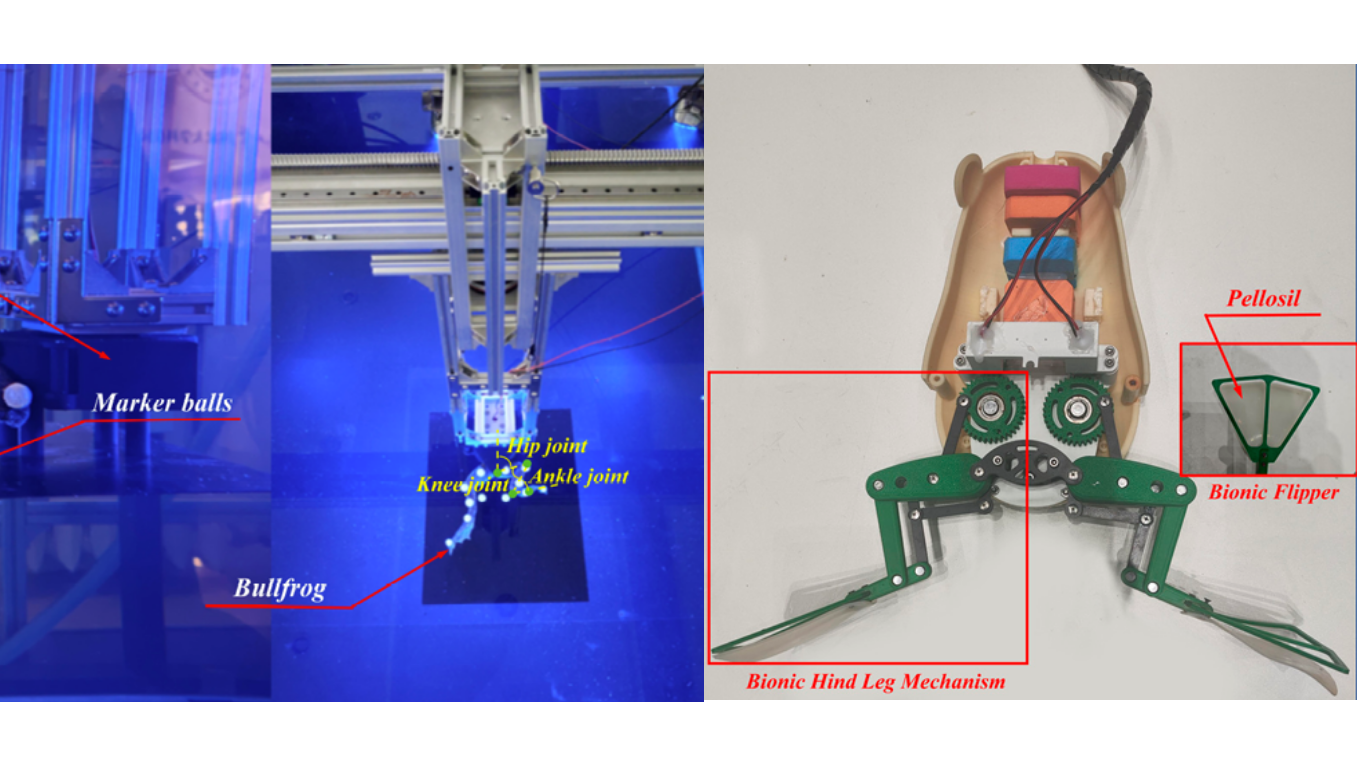 东北大学储逸尘在 Biomimetics 及 JMSE 发表两项仿生水下机器人研究,以牛蛙后肢及牛鼻鲼胸鳍为灵感基于多连杆机构设计两种仿生水下推进机制,并通过水下动捕实验验证其运动学与推进性能。研究团队采用 NOKOV 度量动作捕捉系统用于获取真实生物及仿生机构在水下环境中的运动学数据,为仿生模型分析与实验验证提供数据支持。
东北大学储逸尘在 Biomimetics 及 JMSE 发表两项仿生水下机器人研究,以牛蛙后肢及牛鼻鲼胸鳍为灵感基于多连杆机构设计两种仿生水下推进机制,并通过水下动捕实验验证其运动学与推进性能。研究团队采用 NOKOV 度量动作捕捉系统用于获取真实生物及仿生机构在水下环境中的运动学数据,为仿生模型分析与实验验证提供数据支持。 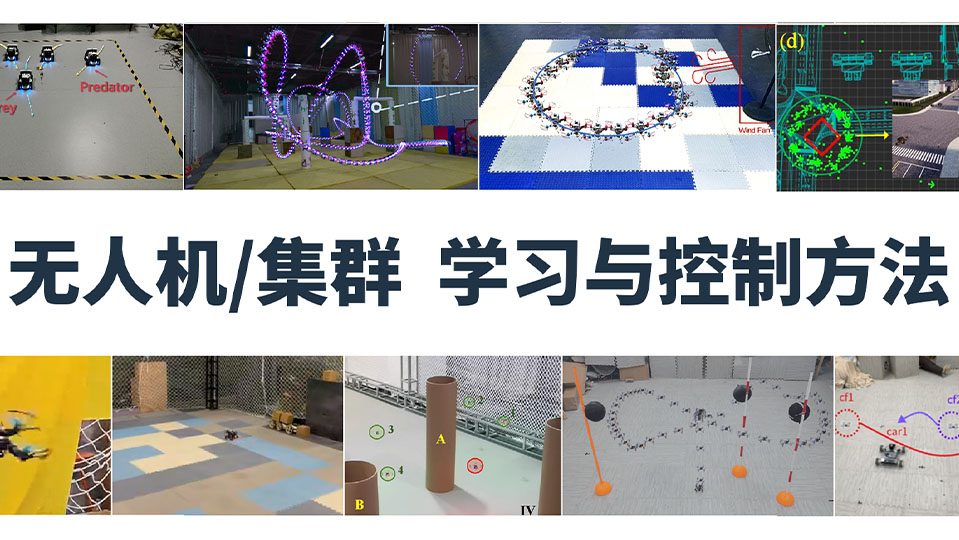 高精度光学动作捕捉如何为无人机提供飞行姿态与轨迹真值?在IROS 2025多项无人机学习与控制的相关研究中,NOKOV度量动捕系统通过提供无人机的亚毫米级位姿真值,支撑从动态模型验证、强化学习闭环控制到多机协同策略评估等一系列无人机研究真实实验,成为算法从仿真走向可靠部署的“度量标尺”。
高精度光学动作捕捉如何为无人机提供飞行姿态与轨迹真值?在IROS 2025多项无人机学习与控制的相关研究中,NOKOV度量动捕系统通过提供无人机的亚毫米级位姿真值,支撑从动态模型验证、强化学习闭环控制到多机协同策略评估等一系列无人机研究真实实验,成为算法从仿真走向可靠部署的“度量标尺”。  浙公网安备 33010602011771号
浙公网安备 33010602011771号