ManiSkill2 踩坑记录:从 pip 安装到成功回放 PickSingleYCB Demo(Vulkan/Wrapper 全流程)
在 Linux 上从零搭建 ManiSkill2(mani-skill2==0.5.3)并成功回放官方 PickSingleYCB 演示轨迹
最容易卡住的坑(Vulkan 渲染设备、环境 wrapper 兼容)一次性解决
主要的问题在于服务器显示gui需要通过x11转发,然后这里vulkan的配置有一些问题
1. 环境与依赖安装
我使用 conda 建立独立虚拟环境并安装 ManiSkill2:
conda create -n maniskill2 python=3.10
conda activate maniskill2
pip install mani-skill2
安装完成后确认包版本:
mani-skill2==0.5.3
依赖里关键的是 sapien==2.2.2(ManiSkill2 的物理仿真/渲染底座)
安装完成后可以在环境中 import mani_skill2 通过。
2. 下载最小资产与 demo(最小可运行集)
为了尽快跑通桌面刚体抓取任务,我只下载了最基本的资产:
python -m mani_skill2.utils.download_asset ycb
python -m mani_skill2.utils.download_asset minimal_bedroom
python -m mani_skill2.utils.download_demo PickSingleYCB-v0
下载完成后,demo 轨迹文件位于类似路径:
demos/v0/rigid_body/PickSingleYCB-v0/*.h5
3. 第一个大坑:SAPIEN 报 “Cannot find a suitable rendering device”
执行回放时出现:
RuntimeError: Cannot find a suitable rendering device
这是 Vulkan 渲染链路问题,不是 ManiSkill2 本身的代码 bug。排查思路:
安装并运行 Vulkan 工具检查 Vulkan 是否可用:
sudo apt-get install -y vulkan-tools
vulkaninfo | head -n 50
我这里 vulkaninfo 提示存在 lavapipe/llvmpipe(软件 Vulkan)以及 NVIDIA GPU,但 ManiSkill2/SAPIEN 仍然无法选到合适的渲染设备。
关键发现:系统 Vulkan ICD 路径中没有 NVIDIA ICD(/usr/share/vulkan/icd.d/ 里只有 intel/lvp/radeon),但在:/etc/vulkan/icd.d/找到了 nvidia_icd.json。
解决方法:强制 Vulkan 使用 NVIDIA ICD
export VK_ICD_FILENAMES=/etc/vulkan/icd.d/nvidia_icd.json
为避免每次手动设置,我将其写入 ~/.bashrc:
echo 'export VK_ICD_FILENAMES=/etc/vulkan/icd.d/nvidia_icd.json' >> ~/.bashrc
source ~/.bashrc
之后 ManiSkill2 的渲染设备错误消失。
4. 第二个坑:找不到 demo 文件(FileNotFoundError)
如果直接在 ~ 目录运行 replay,可能会报:
FileNotFoundError: ... demos/... No such file or directory
原因是 demo 下载在项目目录(如 ~/my_code/manipulation),相对路径在 ~ 下不成立。解决方法:
cd 到 demo 所在目录再运行;或使用绝对路径。
5. 第三个坑:Gym wrapper 导致 obs_mode/control_mode 读取失败
回放继续后报错:
AttributeError: 'TimeLimit' object has no attribute 'obs_mode'
原因:gym.make() 返回的 env 被 TimeLimit wrapper 包装,obs_mode/control_mode 在底层 env 上。
修复方法:对 replay 脚本做最小补丁(unwrapped)
定位文件:
python -c "import mani_skill2.trajectory.replay_trajectory as rt, os; print(os.path.abspath(rt.file))"
在 env = gym.make(...) 后插入:
env = env.unwrapped
6. 第四个坑:RecordEpisode wrapper 没有 render_human
继续回放后出现:
AttributeError: 'RecordEpisode' object has no attribute 'render_human'
同样是 wrapper 没转发接口。最小修复:
将 replay 脚本中的:
env.render_human()
改为:
env.unwrapped.render_human()
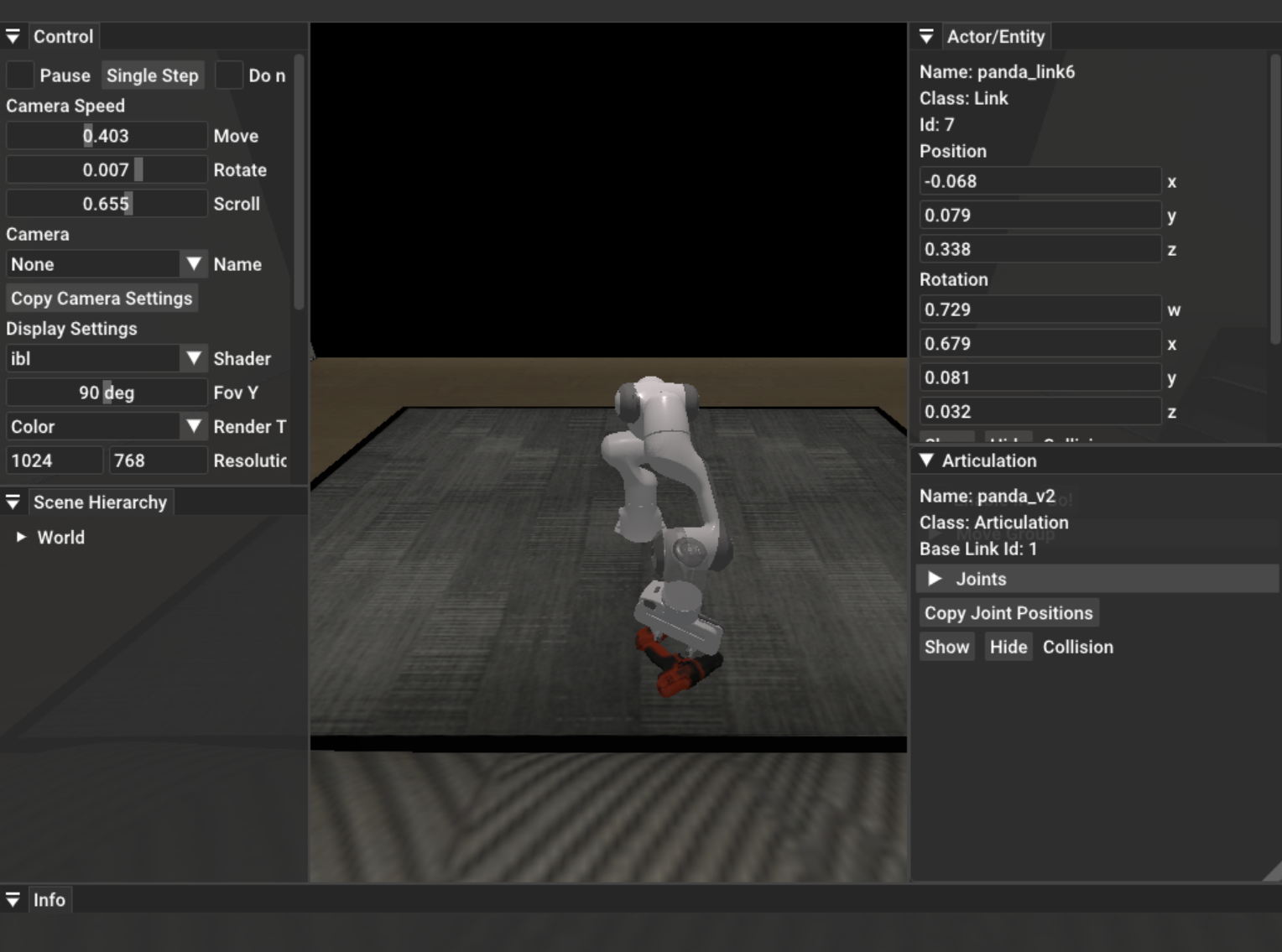
修复后终于能正常显示回放画面,demo 成功运行。
FILE=/home/aiziqing/anaconda3/envs/maniskill2/lib/python3.10/site-packages/mani_skill2/trajectory/replay_trajectory.py
grep -n "render_human" $FILE | head -n 5
sed -i 's/env\.render_human()/env.unwrapped.render_human()/g' $FILE
grep -n "render_human" $FILE | head -n 5
7. 最终可用的回放命令
在 demo 目录下运行(示例):
VK_ICD_FILENAMES=/etc/vulkan/icd.d/nvidia_icd.json \
python -m mani_skill2.trajectory.replay_trajectory \
--traj-path demos/v0/rigid_body/PickSingleYCB-v0/035_power_drill.h5 \
--vis --bg-name minimal_bedroom
如果你是纯 SSH 无 GUI 环境,--vis 可能会遇到显示问题,此时建议使用离屏渲染/保存视频模式(以 -h 参数为准)。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号