
mpu6050
常见问题
https://blog.csdn.net/weixin_42108484/article/details/123235309
姿态解算
[关于MPU6050的数据获取、分析与处理]( https://blog.csdn.net/acktomas/article/details/89087174?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522166158105216782425196512%2522%252C%2522scm%2522%253A%252220140713.130102334.pc%255Fall.%2522%257D&request_id=166158105216782425196512&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2allfirst_rank_ecpm_v1~pc_rank_34-3-89087174-null-null.142%5Ev42%5Epc_rank_34 ,185%5Ev2%5Etag_show&utm_term=mup6050%E5%8E%9F%E5%A7%8B%E6%95%B0%E6%8D%AE%E8%AE%A1%E7%AE%97%E5%8A%A0%E9%80%9F%E5%BA%A6%E3%80%81%E8%A7%92%E9%80%9F%E5%BA%A6&spm=1018.2226.3001.4187)
MPU6050原始数据分析——学习笔记
[MPU6050原始数据计算加速度、角速度、倾斜角度]( https://blog.csdn.net/qq_45595840/article/details/126557339#:~:text=Angle [x] %3D atan 2 (AccValue.X%2C AccValue.Y) *180%2F3.14 ,%3D%20atan%202%20%28AccValue.Z%2C%20AccValue.Y%29%20%2A180%2F3.14%20f%3B%20%E8%AF%A5%E5%85%AC%E5%BC%8F%E9%80%82%E7%94%A8%E7%9A%84%E5%88%9D%E5%A7%8B%E5%A7%BF%E6%80%81%E6%98%AF%E7%AB%96%E7%9B%B4%E7%9A%84%EF%BC%8C%E4%B9%9F%E5%B0%B1%E6%98%AFMPU6050%E7%9A%84Y%E8%BD%B4%E7%AB%96%E7%9B%B4%E5%90%91%E4%B8%8A%E6%97%B6%E6%98%AF%E5%88%9D%E5%A7%8B%E7%8A%B6%E6%80%81%EF%BC%8C%E6%AD%A4%E6%97%B6%E7%9A%84%E8%A7%92%E5%BA%A6%E4%B8%BA0%E3%80%82)
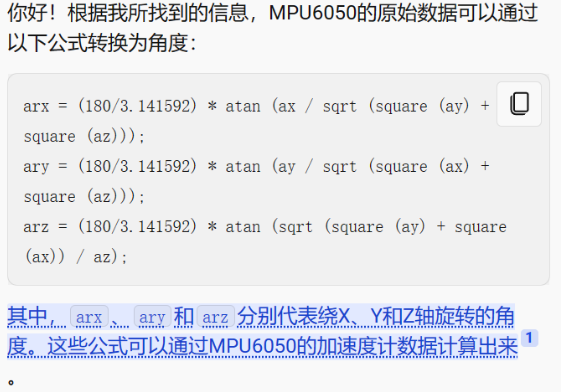
来自必应
MPU6050加速度、角速度的解算以及互补滤波使用
esp32系列(10):mpu6050驱动

 浙公网安备 33010602011771号
浙公网安备 33010602011771号